不止跳舞!宇树机器人轻松拿捏平衡木、梅花桩
2025-02-20 08:28 科创板日报

为多边形脚掌量身定制的基于采样的落脚点奖励机制:大多数四足机器人的脚是点状,但人形机器人的脚通常是多边形,为点状脚设计的落脚点奖励并不适用于多边形脚。故研究团队为人形机器人的多边形脚掌量身定制了基于采样的落脚点奖励机制,并采用“双评价器”(double-critic)架构,来平衡密集移动奖励和稀疏落脚点奖励之间的学习过程,鼓励机器人最大化脚与安全立足点的重叠,从而提升地形感知能力。

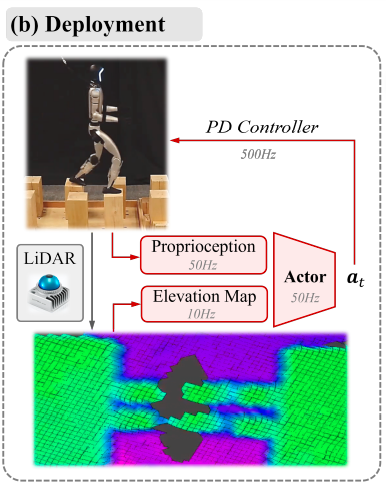
搭载基于激光雷达的高程地图系统:这是为了实现真实世界的部署,并在模拟训练中融入域随机化,使机器人能实时感知地形细节。
该框架下,G1展现了零样本泛化能力。尽管G1在训练过程中并未接触过稀疏地形与平衡木,但它却能对各类稀疏落脚点地形做到较高成功率的零样本泛化,零样本泛化成功率高达80%。
日前,宇树科技G1机器人多段行走视频流出,包括跳舞、人形机器人遛机器人狗、逛街。其中,流畅的舞姿源自机器人算法升级,宇树科技在视频下方配文称,“你想和Unitree G1一起跳什么舞蹈?算法升级,任意舞蹈任意学。”








