国内首个太空采矿机器人来了!“星际矿工”如何采矿?
2025-03-16 18:21 央视新闻
不仅能适应太空的微重力环境,“采用仿生六足移动结构”,机器人足末端有车轮和锚固结构两种配置,也让它可以在小行星坑洼不平的地面上行走。目前,太空采矿机器人原型机已经向有关部门申请专利,并且通过了初审。
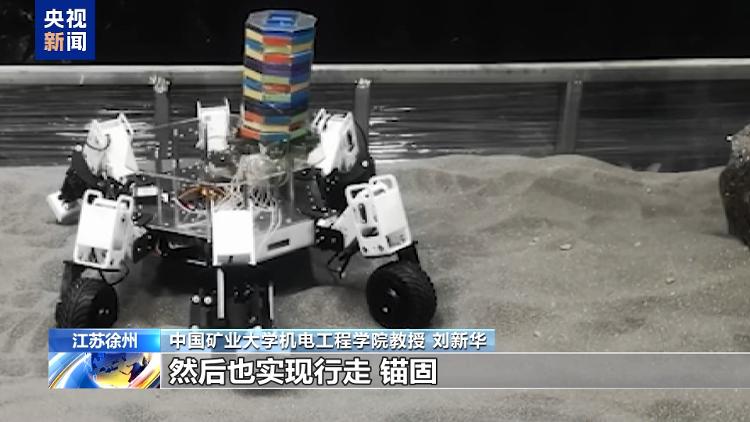
中国矿业大学机电工程学院教授 刘新华:我们实现了这种微重力的等效实验,这个机器人在模拟月壤的环境下,实现行走、锚固,甚至采样。
“星际矿工”的“十八般武艺”
如何练成
太空采矿机器人要在太空星体上完成探矿采矿工作,不仅要面对微重力的问题,还要面对极端温差、真空、太空辐射以及重量体积限制等一系列难题。如何让机器人练就“十八般武艺”?刘新华教授团队给太空采矿机器人搭建了一个特殊的“训练场”。
中国矿业大学机电工程学院副教授 华德正:我们搭建这个环境主要考虑两个方面,一个方面就是模拟近地小行星表面的风化程度,主要是以沙壤为主。另一块就是微重力环境,我们设计的这种悬吊机构,通过垂直的悬吊抵消它的重力,实现微重力的变化。
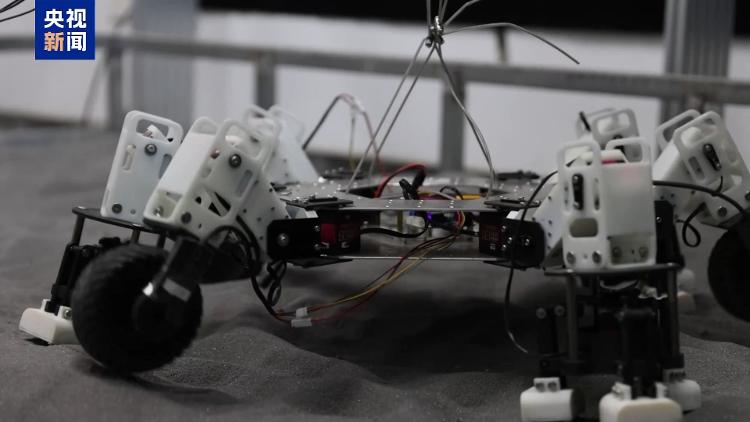
团队成员介绍,经过在沙盘上不断训练,目前,通过六足差动系统悬架、离合器等协同工作,太空采矿机器人已经可以根据工作环境调整自身结构形状,适应地外星体的复杂地表环境。