不止跳舞!宇树机器人轻松拿捏平衡木、梅花桩
2025-02-20 08:28 科创板日报
2月19日,上海AI实验室、上海交通大学、浙江大学、香港大学、香港中文大学联合发布了一项新成果——BeamDojo强化学习框架,能使人形机器人在稀疏立足点地形上实现敏捷且稳健的移动,在模拟和现实实验中展现出高效学习与精准足部定位的能力。
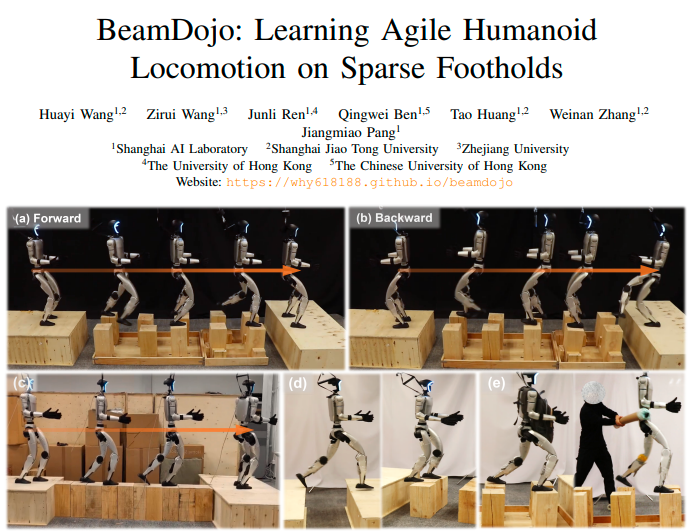
在这个框架下,宇树旗下人形机器人G1可以克服更多危险地形,轻松拿捏平衡木、梅花桩,如稳定地走过多个面积狭小约20厘米宽、间距不一的踏脚石。

G1可以倒着走
在背负6千克重物、遭受外力干扰的情况下,G1也成功通关。
据介绍,BeamDojo框架主要有以下创新点:
两阶段强化学习训练策略,提高机器人学习效率:第一阶段在平地进行训练,同时接收目标任务地形的感知信息;第二阶段切换至实际任务地形中进行策略优化。